Mail Delivery Robot (Bayesian Localization)
2022, Dec 06
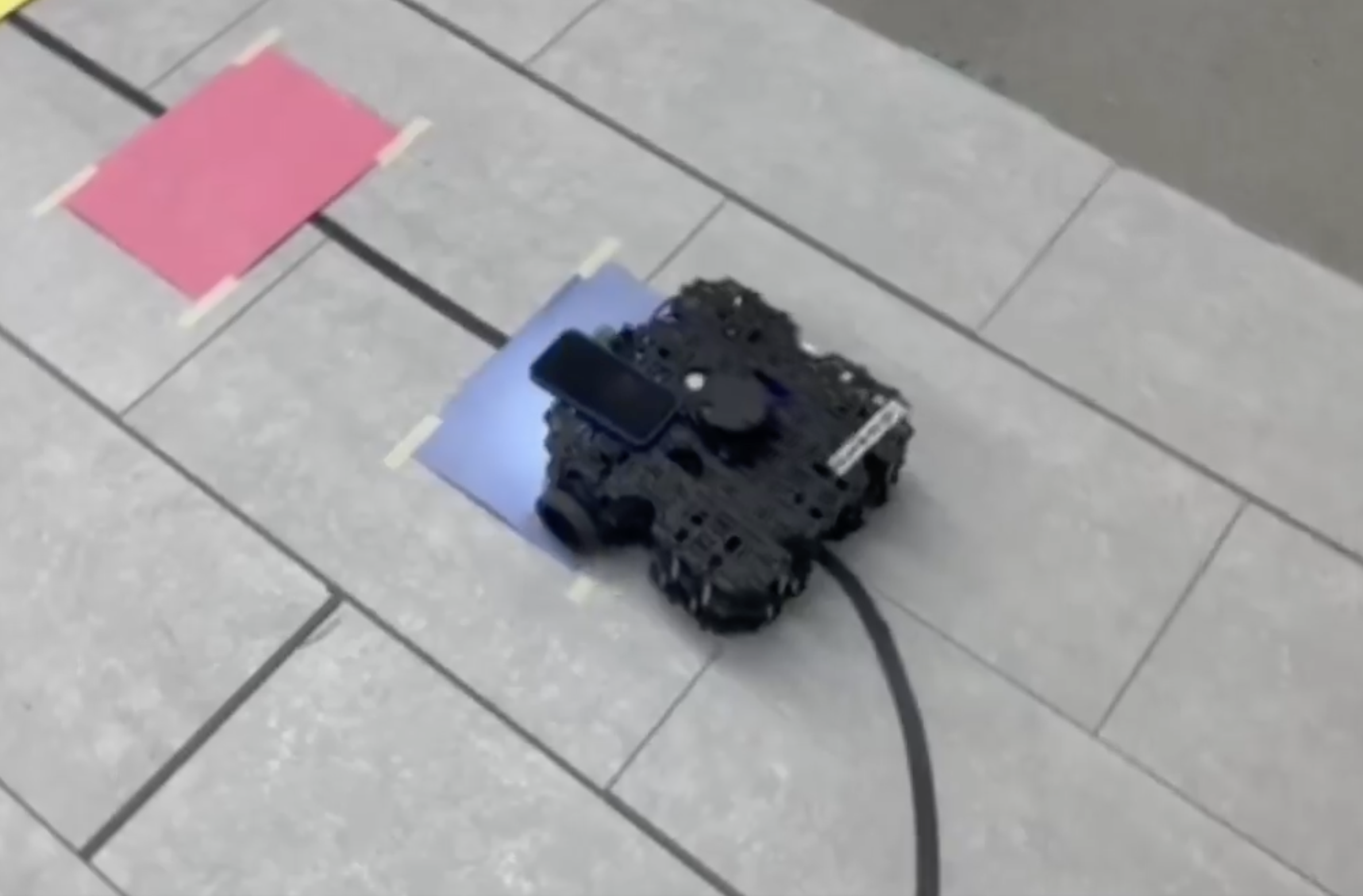
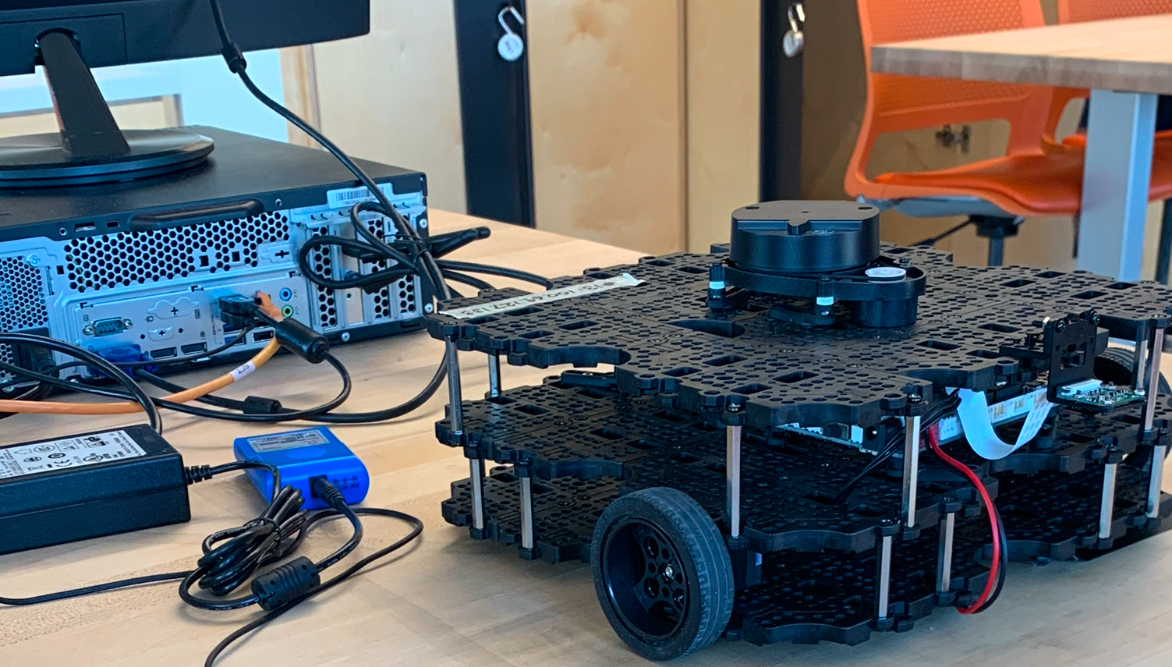
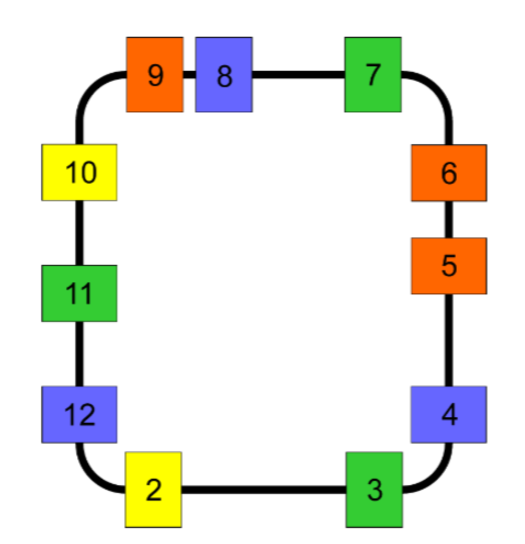
This project involved designing a mail delivery system using the TurtleBot 3 Waffle Pi, integrating state estimation, localization, and real-time control. The robot was programmed to navigate a closed-loop path, stopping at preselected locations (nodes) identified by unique colors.
Control System
- A PID controller was implemented to guide the robot along the black line path, using a downward-facing camera for real-time feedback.
- Camera data was converted to HSV format for improved color detection, overcoming initial challenges with RGB interpretation.
Localization
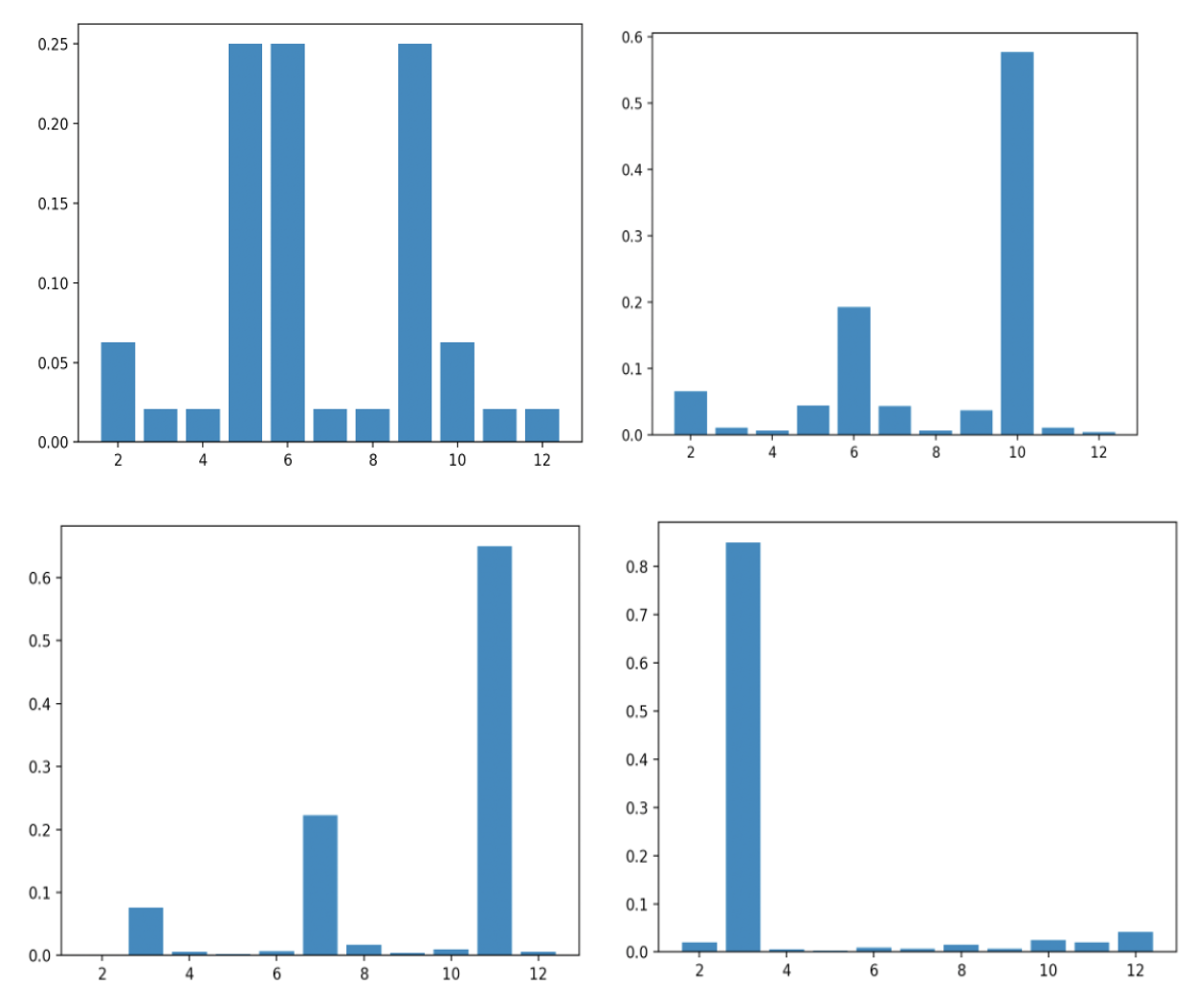
- Bayesian Localization was applied to estimate the robot’s position on a topological map, combining state prediction and measurement updates for accurate positioning.
- Extended Kalman Filter (EKF) techniques were used to enhance precision.
Simulation and Optimization
- MATLAB and Simulink were utilized to model robot behavior before deploying the control and localization algorithms in ROS.
- The system was designed to ensure reliable navigation even under challenging conditions, such as communication delays.
Key Features
- Real-time probability-based localization for high-confidence stops.
- Integration of state prediction and sensor measurements to minimize errors.
- System tuning to balance accuracy and efficiency, with recommendations for faster future performance.
This project demonstrated a robust approach to autonomous robot navigation, showcasing problem-solving in:
- Sensor integration.
- Algorithm design.
- Real-world testing.